- Autor del texto – Antonio Cuadra
- Autor de fotos – Kymco/Moto125.cc
- Fecha – 12/04/2015
El Kymco K-XCT es un nuevo concepto de scooter deportivo que ha tenido una gran aceptación en nuestro mercado. En este reportaje os contamos cómo fue el desarrollo de este modelo desde los primeros bocetos de Massimo Zaniboni en su estudio Arkema de Mantua (Italia) hasta su primera presentación en el Salón de Milán de 2011, pasando por el moldeado en arcilla del primer prototipo a escala real y su posterior renderizado 3D en Kaohsiung (Taiwan).

 La historia de la concepción del K-XCT comenzó en el año 2010 cuando Kymco encarga a Massimo Zaniboni la realización de un nuevo proyecto denominado “Sport Fusion” con una serie de indicaciones. Massimo ya había trabajado con Kymco para otros proyectos que han catapultado al éxito a la compañía taiwanesa; merece la pena destacar los modelos SuperDink, Agility City, Xciting o Like, o los futuros Downtown y Agility Maxi que se dieron a conocer en el último Salón de Milán. Massimo también ha trabajado anteriormente para el grupo Piaggio (Piaggio, Moto Guzzi, Aprilia, Derbi y Gilera), Mondial Moto (Starfighter) y sobre todo en la última etapa de Italjet (Modelos Grifon, Jet Set y Millennium).
La historia de la concepción del K-XCT comenzó en el año 2010 cuando Kymco encarga a Massimo Zaniboni la realización de un nuevo proyecto denominado “Sport Fusion” con una serie de indicaciones. Massimo ya había trabajado con Kymco para otros proyectos que han catapultado al éxito a la compañía taiwanesa; merece la pena destacar los modelos SuperDink, Agility City, Xciting o Like, o los futuros Downtown y Agility Maxi que se dieron a conocer en el último Salón de Milán. Massimo también ha trabajado anteriormente para el grupo Piaggio (Piaggio, Moto Guzzi, Aprilia, Derbi y Gilera), Mondial Moto (Starfighter) y sobre todo en la última etapa de Italjet (Modelos Grifon, Jet Set y Millennium).
Diseño italiano
El proyecto “Sport Fusion” lo interpretó como un scooter compacto, rápido, ágil, deportivo, de alta tecnología y a la vez inteligente, con detalles prácticos como un coche utilitario deportivo: “cool” y funcional al mismo tiempo. “Cuando creo y diseño un nuevo scooter o moto me inspiro principalmente en la naturaleza porque aporta soluciones impresionantes por su belleza, perfección y capacidad para sorprender. ¡Un buen maestro!“, nos comenta Massimo. “El diseño del K-XCT, por ejemplo, se inspira en un halcón precipitándose en picado para atacar a su presa. Rápido y cínico. El escudo frontal del scooter se asemeja a la cabeza del halcón, las dos ópticas de los faros con forma de ojos despiadados, las molduras laterales son las alas… El viento se ocupa de moldear las superficies de su cuerpo“.
Desde el taller de diseño Arkema en Italia, Massimo diseña y modela las superficies del vehículo y ayuda en el desarrollo 3D de los primeros esbozos intentando transmitir y compartir esas ideas a todo el equipo de Kymco R&D (Investigación y Desarrollo) en Taiwán.
El proceso que lleva desde los dibujos en papel hasta la primera maqueta a escala real es un diálogo continuo -un “tira y afloja” como nos comenta Massimo- entre todos los jugadores del equipo: la creatividad del diseñador, ingeniería, tecnologías innovadoras y las necesidades del mercado. Siempre aparece una gran cantidad de limitaciones que se deben resolver y decenas de modificaciones y adaptaciones del diseño original en el proceso I+D.
 |
 |
| Uno de los primeros bocetos del K-XCT, concretamente el segundo. El concepto se parece bastante al resultado final. Al principio se pretendía comenzar el asiento desde más abajo y próximo al borde inferior de la tapa que da acceso al tapón de gasolina, simulando estar hecho en tres piezas: asiento del conductor, del pasajero y respaldo del conductor. Fíjate también en el silenciador de escape que intenta salir desde la parte posterior de la quilla como si se tratara de una “Superbike”. Las formas de las “cachas” laterales traseras se respetan. No se consiguió el efecto de dar formas continuas al guardabarros delantero con el volumen inferior del escudo. Tampoco aparecen los alerones laterales del volumen superior del escudo y las toberas a cada lado del travesaño central (junto a donde se apoyan los pies). |
|
 |
 |
 |
 |
| Aquí damos el salto a la séptima revisión. Se adapta más a la realidad el diseño del asiento y el del silenciador de escape y aparece la idea de los alerones laterales tanto en el volumen superior del escudo como en el túnel o travesaño central. Las asideras laterales parecen estar hechas en una pieza con forma lateral de spoiler pero que incluye una base de portabultos. Los intermitentes se ubican en la parte superior de los faros por LEDs. Todavía no se contempla la Guía Luminosa LED y forman el ángulo en “L” de cada faro unas hileras de LED. En el dibujo inferior del lado izquierdo se aprecian las llantas de cinco palos ligeramente desviados de los radios, un parabrisas más alto y envolvente y las formas de los cárteres del motor del SuperDink 300. |
|
 |
|
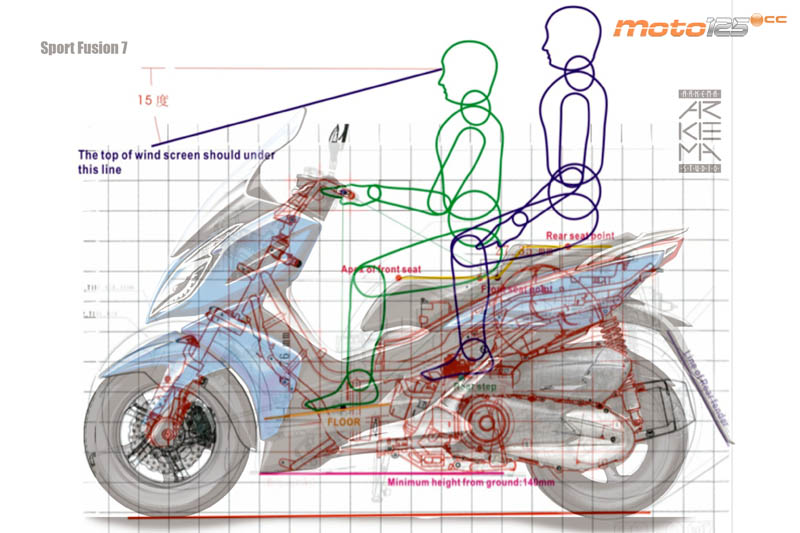
| Este es el primer paso hacia el modelo 3D: el dibujo de la versión 7.0 de Zaniboni se hace coincidir a escala 1:5 con el plano del bastidor que aporta el departamento de ingeniería y los dibujos de los “dummies” para la ergonomía. Fíjate en el detalle del ángulo de visión del conductor recordando que el extremo superior del parabrisas no debería superar esa línea, la situación del casco integral debajo del pasajero, o las exigencias de no bajar la luz del suelo de los 145 mm de altura y la línea del guardabarros trasero para que no roce con la rueda. | |
Modelo a escala real en arcilla
El departamento de ingeniería de Kymco ya tiene bastante claro el diseño del bastidor. De hecho, en el último dibujo mostrado arriba en el que se superponen sus formas con las del último boceto de Zaniboni se aprecia que son las definitivas fruto de pruebas dinámicas sobre scooters “desnudos” sin carrocería. Ese “esqueleto” definitivo sirve de estructura para dar forma sobre él a la primera “maqueta” a escala real.
A partir de esta etapa, el desarrollo del K-XCT se lleva a cabo en las instalaciones de Kymco R&D en Taiwán. Para modelar se emplea una especie de plastilina denominada “clay” (arcilla en inglés) a la que se le puede dar forma con facilidad, endurece rápido y además permite rectificar formas aplicando calor con una pistola de aire caliente.
 |
 |
| El prototipo a escala 1:1 emplea el bastidor definitivo entregado por el departamento de ingeniería con el motor de 300 cc. Las llantas son las del SuperDink pero ya se tiene claro un semibasculante derecho con la pinza de freno en otra posición diferente (no está la pinza pero sí los anclajes). En esta imagen se ven las formas definitivas del parabrisas con el canto superior al estilo People GTi y la posición de los intermitentes delanteros en el canto del paso de rueda. Fíjate también en las asideras traseras que son de una pieza. |
|
 |
 |
| En esta vista lateral derecha se aprecia que se repite la solución del alerón lateral del volumen superior del escudo para el travesaño central. En la serie el primer alerón sobresale más y deja una “estela” hacia atrás, mientras que el segundo se sustituye por una tobera. La forma de la moldura que cubre al silenciador es la misma que se emplea en la versión de 300 cc, mientras que para el guardabarros delantero se recurre a uno menos alto y más parecido al SuperDink. |
|
 |
 |
| Desde detrás, por el lado derecho, se aprecia una gran similitud con el modelo definitivo. Hay detalles que no pasaron a la serie como el sistema de estriberas traseras desplegables por un botón (como en el Yager y Like) y se tantea con unos “rabillos” montados sobre el portabultos el sistema definitivo de asideras independientes. También parece que se han olvidado del gancho portabolsas. |
|
 |
 |
| No es que se esté experimentando con amortiguadores de gas. Se trata de unos amortiguadores rígidos. Las formas del guardabarros trasero con el postizo desmontable inferior así como la luz de la matrícula son las definitivas. |
No hay simetrías en el diseño de la maqueta a escala real. Fíjate que por este lado izquierdo se aprovecha para experimentar otras soluciones: no hay alerón en el volumen superior del escudo y también se prueba con otro tipo de estriberas parecidas a las definitivas aunque en una posición más baja. El asiento está moldeado en “foam” como los de serie, aunque sus formas son más picudas. |
 |
 |
| El puesto de mandos es muy parecido al definitivo. El manillar está un poco destartalado sin la maneta-bomba izquierda: se trata de subirse al proto y probar ergonomías. La pequeña cúpula que envuelve el cuadro está bien definida. También se prueban soluciones en los lados derecho e izquierdo para el salvapiernas inferior: más vaciado o más macizo. |
|
 |
 |
| Desde esta vista superior se aprecian los “rabillos” de las asideras laterales montados sobre el portabultos de una pieza. Fíjate también que son diferentes e incluso se contempla una moldura central. Sobre la misma pieza de “foam” del asiento se hacen anotaciones como el rebaje hacia atrás del respaldo en 3-4 cm. | La vista frontal es casi definitiva. Se puede apreciar en la barra izquierda (a la derecha en la foto) una pieza metálica apoyada entre la tija y los soportes del guardabarros para hacer rígida la horquilla. Como hemos comentado antes, no se emplea este guardabarros tan envolvente en la serie, posiblemente porque rozaba con el paso de rueda en los giros. |
Escaneado y renderizado
Una vez dado el visto bueno a la maqueta a escala real en arcilla se procede al escaneado del modelo en tres dimensiones. Con el K-XCT digitalizado se procede a pulir superficies y a definir los diferentes componentes de la carrocería, así como sus tetones o garras de unión entre las múltiples piezas. Con ello ya se puede proceder a construir los distintos moldes de plástico que se van a emplear en la serie.
 |
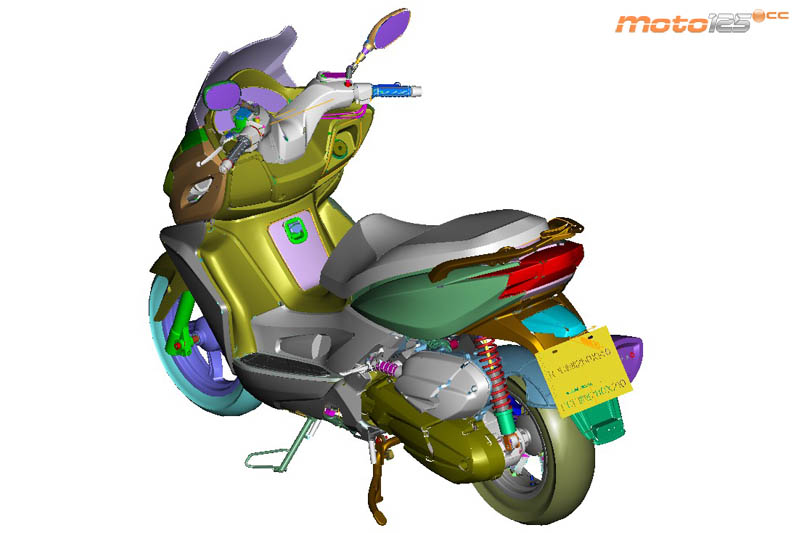 |
| La imagen “render” muestra en diferentes colores las distintas piezas de plástico que componen la carrocería del K-XCT. Se puede ver que ya están definidas muchas dudas que veíamos en el prototipo de arcilla: guardabarros delantero, alerones superiores y toberas en travesaño central, estriberas del pasajero, asideras independientes, etc. Solo falta el gancho retráctil. | |
Tecnología

Uno de los requisitos que se especificaba en el proyecto “Sport Fusion” era la tecnología. En este sentido, los últimos modelos de Kymco aportan las últimas novedades en el campo de la iluminación y el K-XCT no iba a ser menos. Para ello se recurrió a la empresa taiwanesa TYC especializada en iluminación LED para el sector del automóvil escogiéndose la última tecnología de aquel momento: la Guía Luminosa LED. Se trata de una barra en fibra óptica que distribuye por su superficie exterior la luz emitida por unos diodos LED situados en sus extremos.
Además, para el cuadro de instrumentos se empleó uno completamente digital en cristal líquido LCD, completándose recientemente con la versión ABS que lo convierte en el primer scooter de 125 cc en emplear la última generación Bosch de moduladores.
Puesta en escena


El K-XCT se presentó por primera vez en público en el Salón EICMA de Milán en noviembre de 2011. La unidad se mostraba en la cilindrada de 300 cc aunque ya se aclaraba que también la acompañaría una variante de 125 cc. Del lápiz al Salón en tan solo un año y medio, tiempo récord para el desarrollo de un nuevo modelo, aunque después hubo que esperar otro tanto hasta su comercialización en España en marzo de 2013 por pruebas dinámicas.
El mismo prototipo fue mostrado a primeros de diciembre en el Tokyo MotorShow de 2011 con la luz de posición iluminada en los faros por sendas hileras de 12 LEDs cada una que serían sustituidas en la serie por las Guías Luminosas LED antes mencionadas en el apartado de tecnología. También diferían de la serie el asiento y los retrovisores.
Previo a su lanzamiento, el K-XCT se volvió a presentar en el EICMA de noviembre de 2012 y con sistema de frenada ABS un año después (os mostramos a la izquierda la foto con su creador Massimo Zaniboni) iniciando su comercialización en España en octubre del año pasado.
A Massimo Zaniboni le vemos abajo con las dos últimas creaciones que fueron mostradas en el último Salón EICMA de Milán: el Downtown 125i/350i y el Agility Maxi 300i. De estos modelos ya nos ocuparemos más adelante en otro reportaje “Cómo se hizo”.